The Soft Side of Robotics
Claudia Shi | January 31, 2023

Dr. Xiaoguang Dong, an assistant professor in the department of mechanical engineering, is currently conducting research in the field of miniature robotics. His lab works on overlapping fields of soft robotics, medical devices, wireless actuation, and miniature robotics. One of the main focuses of Dr. Dong’s lab is on bio-inspired ciliary soft robotics. Coordinated ciliary movement is essential to many living systems, where the wave dynamics of cilia have been hypothesized to enhance net fluid flows. Compared to traditional unwieldy robotics that involve large robotic arms, soft robotics has diverse degrees of freedom, and its movement is primarily controlled by magnetic forces.
This type of shape-programmable robotics design is inspired by cilia movement on microorganisms that helps with mobility in a fluid environment. It is potentially applicable in medical devices that regulate human blood flow and fluid and particle transportation in small channels. However, current research on soft robotics is mostly limited to approximation with human intuition instead of using precise manipulation of magnetization profile. Dr. Dong’s research goal is to gain accurate control of the actuating magnetic fields to accomplish time-varying shapes in soft materials.
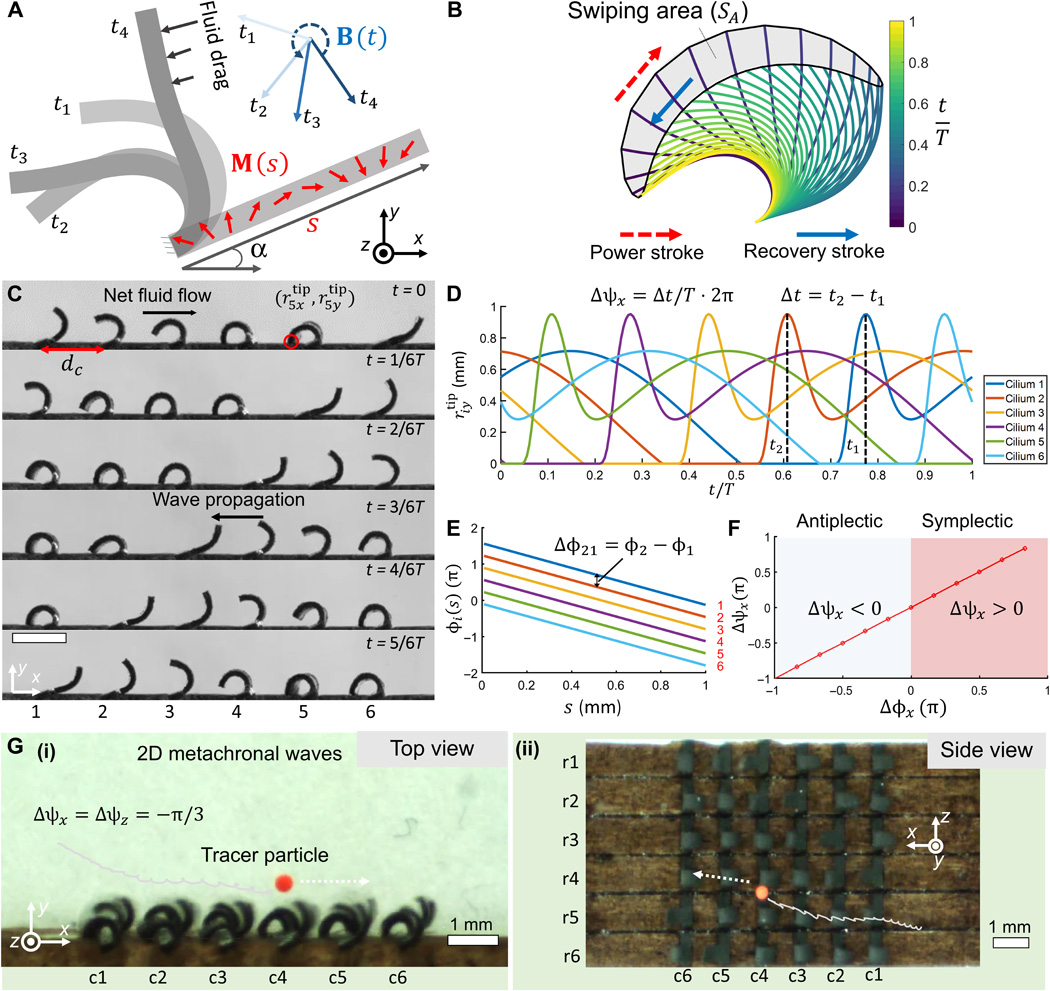
The cilia are designed to have identical geometries and be placed at controlled distance. Each individual cilium is a ferromagnetic-elastic sheet that has an original shape, which is a flat plane, and a deflected shape, which is decided by the magnitude and direction of the magnetic field. Its ferromagnetism ensures that it obtains magnetic properties with the presence of an external magnetic field. With one end fixed in place, the other end is free to sweep in space in reaction to the magnetic field. Its recovery stroke brings the cilium to its most deformed state (entirely bent), then its power stroke makes it sweep back rapidly. Each cilium repeats these back-and-forth strokes at their own rhythms. With metachronal coordination, which manages the motion created by beating waves of cilia, a net fluid flow is generated, and the rate of fluid pumping can be modulated.
Movement of individual cilium may affect the performance of adjacent cilia, so the manipulation of varying magnetic field is also tricky when many of those robots were arranged in a small space. Fluid properties are also crucial aspects that may require adjustment of magnetic torques exerted on the cilia. With ongoing research on the topic, other relevant factors contributing to irregular patterns and limited desired outcomes, such as “weaker magnetization, limited geometry, and material properties,” are still waiting to be further investigated and improved. Still, continuous research in soft ciliary miniature robotics will be contributing to the field of minimally invasive medical devices and wireless micro robotics.
References
Dong X, Lum GZ, Hu W, Zhang R, Ren Z, Onck PR, Sitti M. 2020. Bioinspired cilia arrays with programmable nonreciprocal motion and metachronal coordination. Science Advances. 6(45). doi:10.1126/sciadv.abc9323.
Lum GZ, Ye Z, Dong X, Marvi H, Erin O, Hu W, Sitti M. 2016. Shape-programmable magnetic soft matter. Proceedings of the National Academy of Sciences. 113(41). doi:10.1073/pnas.1608193113.
Ferromagnetic Materials – Definition, Causes of Ferromagnetism, Examples, Uses. BYJUS. https://byjus.com/jee/ferromagnetic-materials/.
Dong X. 2020. Artificial magnetic cilia with programmable nonreciprocal motions and metachronal waves. [accessed 2022 Dec 19]. https://www.science.org/doi/10.1126/sciadv.abc9323.